Wie wähle ich eine geeignete Controller-Verstärkung für diesen Roll-Control-Autopiloten aus?
Liam
Ich versuche, einen geeigneten K-Wert für diesen Rollsteuerungs-Autopiloten auszuwählen, basierend auf:
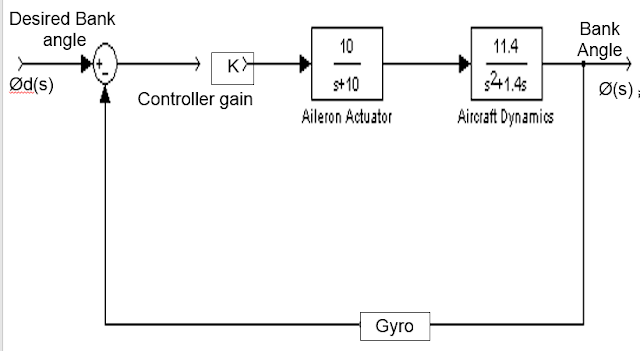
Anstelle des Gyro habe ich auch nur eine negative Eins-proportionale Verstärkungsrückkopplung in Betracht gezogen. Wie wähle ich die passende Reglerverstärkung K für das System aus? (Ich füttere einen Schrittimpuls in das System). Ich weiß, dass es für jedes Flugzeug anders wäre, für einen Kampfjet will man schnelle Reaktionszeiten, aber vielleicht nicht so sehr bei einem Verkehrsflugzeug. Was ich herausfinden/verstehen möchte, gibt es Designkriterien/eine Methode zur Auswahl dieses Werts?
- Gibt es eine Überschreitung (%), die ich anstreben sollte?
- Ist ein erforderliches Dämpfungsverhältnis eingestellt?
- Oder schaue ich es mir an und finde ein Gleichgewicht zwischen der Einschwingzeit und dem Überschwingen (%)?
Antworten (1)
Koyovis
Sie möchten eine schnelle Reaktion, aber kein Überschwingen. Die perfekte Antwort auf eine Sprungeingabe wäre in diesem Fall eine kritisch gedämpfte . Matlab/Simulink sind hier deine Freunde.
Dinge, die Sie in Ihrer Feedback-Schleife berücksichtigen sollten:
- Flugzeugdynamik - wird die anfängliche Trägheitsreaktion modelliert? Das heißt, rollt das Flugzeug beim Querruderausschlag auf seine endgültige Rollrate?
- Wird der aerodynamische Rollwiderstand modelliert?
- Handelt es sich um eine digitale Schleife, und wenn ja, welche Integratoren verwenden Sie? Wenn Euler Ihre Schleifenraten hoch sein müssen.
Ich habe ein ähnliches Design für einen Hubschrauber mit einer Controller-Verstärkung von 20 und einem zusätzlichen Rollkompensator gesehen in der Vorwärtsschleife und eine negative Einheitsrückkopplung.
Sie können die Reaktion beobachten, verschiedene Einstellungen für die Rückkopplungsverstärkung verwenden und die schnellste Reaktion ohne Überschwingen finden. Sie müssten es für mehrere Extreme testen. Sie brauchen auch irgendeine Form von Dämpfungsrückkopplung, ich schätze, Ihre erste Aufgabe wäre es, eine Antwort zu finden, die nicht oszilliert.
Wozu dient dieser Querruder-Hinterkantenstreifen?
Welche Art von Kabel wird verwendet, um Signale von Flugsteuerungscomputern zu Aktuatoren zu übertragen?
Warum lockern sich die Flugsteuerungskabel während der kalten Temperaturen im Reiseflug nicht?
Warum haben nicht alle GA-Flugzeuge Gierdämpfer?
Wie unterscheiden sich Höhenruder-Servo- und Anti-Servo-Tabs (mit Getriebe)?
Verschleißen einige Flugtechniken Flugzeuge schneller als andere?
Warum „klebt“ das Joch in einer Wendeposition?
Warum sind die Steuerungen von Flugzeugen der Transportkategorie viel schwerer als von Leichtflugzeugen?
Querruderausschlag des F16 im Start- und Landegewinn?
Wie kann eine größere Spannweite die Stärke der Flügelspitzenwirbel verringern?
Federico
Liam
Federico
Liam