Kraft, die auf das Rad in reiner Rollbewegung am Kontaktpunkt mit der Straße aufgebracht wird [geschlossen]
ri_ri
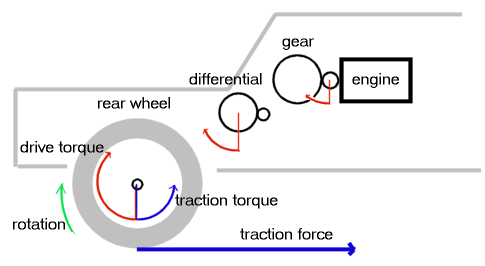
Angenommen ein Rad mit Radius auf einer nicht geneigten Fläche aufliegt. Ein Drehmoment wird auf die Radmitte aufgebracht. Um zu verhindern, dass das Rad durchdreht, übt der Boden am Kontaktpunkt (parallel zur Oberfläche) eine statische Reibungskraft auf das Rad aus, dann beginnt das Rad zu rollen, ohne durchzudrehen. Die gleiche Reibungskraft wirkt auch als Drehmoment auf das Rad um seine Achse. Dieses Szenario ist unten dargestellt:

Ich versuche, die Größe der Kraft zu finden, die der Boden auf das Rad ausübt - dh die Kraft, die das Rad vorwärts treibt (die dieselbe Größe haben sollte wie die Kraft, die das Rad am Kontaktpunkt auf den Boden ausübt). .
So mache ich es:
Die Beziehung zwischen linearer Beschleunigung und Winkelbeschleunigung für eine reine Rollbewegung ist gegeben durch
Die Beziehung zwischen Drehmoment und Winkelbeschleunigung Ist
Wo ist das Trägheitsmoment des Rades um seine Achse.
Die Beziehung zwischen Drehmoment , Gewalt und Hebelarm Ist:
Das Motordrehmoment sein , die Reibungskraft , das Gegendrehmoment aufgrund der Reibungskraft und das Trägheitsmoment des Rades um seine Achse gegeben durch :
Die lineare Beschleunigung des Rades ist nur auf die Reibungskraft zurückzuführen:
Dies ist das Gegenmoment, das der Boden auf die Radkante ausübt (negativ, weil es in die entgegengesetzte Richtung zeigt). ):
Das Nettodrehmoment verursacht eine Winkelbeschleunigung am Rad:
Ersetzen Und In gibt:
Neuordnung:
Und das ist die Kraft aus Haftreibung, die das Rad nach vorne zieht, ohne dass es durchdreht oder rutscht, und folglich die Kraft, die das Rad am Kontaktpunkt auf die Straßenoberfläche ausübt.
Aber ich habe diesen Link gefunden: http://www.asawicki.info/Mirror/Car%20Physics%20for%20Games/Car%20Physics%20for%20Games.html
Und es heißt: „Das Drehmoment an der Hinterachse lässt sich durch Division durch den Radradius in eine Kraft des Rades auf der Fahrbahn umrechnen. (Kraft ist Drehmoment dividiert durch Weg).“
Diese Aussage stimmt nicht mit dem Ansatz überein, den ich oben verwendet habe. Wenn die Kraft des Rades auf den Boden einfach das Motordrehmoment geteilt durch den Radius wäre (negativ, da es in die entgegengesetzte Richtung zeigt):
dann wäre das auf das Rad aufgebrachte Gegenmoment
das impliziert das .
Das bedeutet, dass das Nettodrehmoment Null wäre und das Rad einfach durchrutschen würde, ohne sich überhaupt zu drehen.
Mache ich bei meinen Berechnungen etwas falsch?
Antworten (5)
DWin
Der Trick dabei ist, dass am Kontaktpunkt die Geschwindigkeit des Rades relativ zum Boden (ohne Schlupf) gerade Null ist. Außerdem ist die Beschleunigung zentripetal, also sind die Kräfte, die das Rad tangieren, Null. Also müssen die Reibungs- und Drehmomentkräfte sich zu Null summieren. Und daher hat die Bodenkraft genau das entgegengesetzte Vorzeichen und die gleiche Größe wie die Kraft (Drehmoment / Radius), die vom Motor durch das Rad ausgeübt wird.
ri_ri
ri_ri
DWin
ri_ri
DWin
ri_ri
ri_ri
ri_ri
ri_ri
{kind=link}
DWin
ri_ri
ri_ri
ri_ri
DWin
ri_ri
DWin
ri_ri
ri_ri
DWin
sonnentief
Ich finde deine Analyse gut und richtig. Die von Ihnen zitierte Aussage widerspricht nicht dem, was Sie getan haben, sondern schlägt wahrscheinlich eine andere Betrachtungsweise des Problems vor.
Ich denke, die Aussage gibt einfach eine Methode in der Mechanik an - Übertragung eines Drehmoments auf einen anderen Punkt (Koordinatenachsen). In diesem Fall von der Radmitte zum Aufstandspunkt.
Mathematisch kann ein Drehmoment durch ein Kräftepaar ersetzt werden, wobei eine Kraft im Zentrum und die andere ein Punkt ist in einem tangentialen Abstand von . Die Größe der Kraft wäre:
Das ist nicht die Reibungskraft.
Der Begriff „Gegenmoment“ macht keinen Sinn mehr, da wir das Drehmoment durch ein Kräftepaar ersetzt haben. Sie können stattdessen sagen, dass das vom Boden aufgebrachte "Drehmoment" wäre:
welches ist
=
Rick
Die Gleichung aus dem Link ist eine Annäherung. In Ihrer Analyse beziehen Sie die Masse des Autos nicht ein, wenn Sie die lineare Beschleunigung berücksichtigen. Sie berücksichtigen auch nicht die Reaktionskraft des Rads / der Achse, die das Auto beschleunigt. Sie können das Antriebsmoment in zwei Anteile aufteilen, den Anteil, der das Rad rotatorisch beschleunigt, und den Anteil, der durch die Reibung an der Aufstandsfläche ausgeglichen wird. Da die Kraft an der Aufstandsfläche das gesamte Auto beschleunigt, ist die Größe dieses Anteils viel größer als die Größe des Anteils, der das Rad beschleunigt. Wenn Sie die Massendifferenz auf die Spitze treiben und ein masseloses Rad annehmen, dann wird ihre Annäherung exakt.
David D
Ihre gesamte Analyse ist völlig richtig und vollständig (und meiner Meinung nach der beste Weg, dies zu tun). Es müssen keine weiteren Informationen zu diesem Problem abgeleitet werden. Andere Analysen sind nur unterschiedliche Darstellungen derselben Tatsachen.
Kyle Kanos
Bas-Jan
Das Problem besteht in der Annahme, dass die Kraft an einem Kontaktpunkt direkt unter der Radachse nach vorne gerichtet ist, zusammen mit der rutschfesten Bedingung. Dies führt zu einer Reibungskraft von Null, da es keine Reibung gibt, wenn es kein Rutschen gibt.
Eine Lösung kann nur gefunden werden, wenn die Verformung des Rades berücksichtigt wird, wodurch die Kraft auf eine andere Position des Rades wirken kann. Siehe zum Beispiel: http://www.phy.davidson.edu/fachome/dmb/PY430/Friction/rolling.html
Ein ähnliches Problem tritt auf, wenn das Rad rollt und durch "Reibung" mit der Oberfläche abgebremst wird. Wenn Sie dieselben Annahmen treffen, muss die Kraft Null sein, da sie sonst entweder das Rad schneller drehen lassen würde, während es seine Vorwärtsbewegung verlangsamt, oder das Rad langsamer drehen und seine Vorwärtsbewegung beschleunigen würde. Beides ist nicht möglich.
Rick
Drehimpuls und Drehmoment eines schwingenden zylindrischen Stabes
Prinzip Mechanik
Wenden Sie eine Kraft auf ein rotierendes Rad an
Unterschied zwischen dem Hinzufügen von Kraftvektoren und dem Hinzufügen von Geschwindigkeitsvektoren
Wie kann man das Trägheitsmoment berechnen?
Drehmoment-Hausaufgaben [geschlossen]
Zusammenhang zwischen Kraft und Drehmoment für eine Schaltung/ein Fahrrad
Drehmoment an Achse und Rad
Ist die Verwendung der Drehimpulserhaltung in diesem Fall richtig? Warum oder warum nicht?
Reibung an einer Riemenscheibe vernachlässigen?
John Alexiou